上QQ阅读APP看本书,新人免费读10天
设备和账号都新为新人
1.3 工业机器人构型
按照工业机器人结构运动形式的不同,其构型主要分5种:直角坐标机器人、柱面坐标机器人、球面坐标机器人、多关节机器人和并联机器人。
(1)直角坐标机器人
直角坐标机器人在空间上具有多个相互垂直的移动轴,常用的是3个轴,即x、y、z轴,如图1-4所示,其末端的空间位置是通过沿x、y、z轴来回移动形成的,是一个长方体。

图1-4 直角坐标机器人
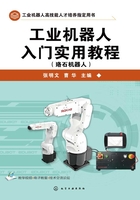
(2)柱面坐标机器人
柱面坐标机器人的运动空间位置是由基座回转、水平移动和竖直移动形成的,其作业空间呈圆柱体,如图1-5所示。

图1-5 柱面坐标机器人
(3)球面坐标机器人
球面坐标机器人的空间位置机构主要由回转基座、摆动轴和平移轴构成,具有2个转动自由度和1个移动自由度,其作业空间是球面的一部分,如图1-6所示。

图1-6 球面坐标机器人
(4)多关节机器人
多关节机器人由多个回转和摆动(或移动)机构组成。按旋转方向可分为水平多关节机器人和垂直多关节机器人。
 水平多关节机器人 由多个竖直回转机构构成的,没有摆动或平移,手臂都在水平面内转动,其作业空间为圆柱体,如图1-7所示。
水平多关节机器人 由多个竖直回转机构构成的,没有摆动或平移,手臂都在水平面内转动,其作业空间为圆柱体,如图1-7所示。

图1-7 水平多关节机器人
垂直多关节机器人 由多个摆动和回转机构组成,其作业空间近似一个球体,如图1-8所示。

图1-8 垂直多关节机器人
(5)并联机器人
并联机器人的基座和末端执行器之间通过至少两个独立的运动链相连接,机构具有两个或两个以上自由度,且以并联方式驱动。工业应用最广泛的并联机器人是DELTA并联机器人,如图1-9所示。
相对于并联机器人而言,只有一条运动链的机器人称为串联机器人。

图1-9 DELTA并联机器人