2.1 传感器的静态特性
2.1.1 线性度
如果理想的输出(y)-输入(x)关系是一条直线,即y = a0x,那么称这种关系为线性输入/输出特性。显然,在理想的线性关系之下,只要知道输入/输出直线上的两个点,即可确定其余各点,故输出量的计算和处理十分简便。
1. 非线性输入/输出特性
实际上,许多传感器的输入/输出特性是非线性的,在静态情况下,如果不考虑滞后和蠕变效应,输入/输出特性总可以用如下多项式来逼近

式中
x——输入信号;
y——输出信号;
a0——零位输出;
a1——传感器线性灵敏度;
a2,a3,…,an——非线性系数。对于已知的输入/输出特性曲线,非线性系数可由待定系数法求得。
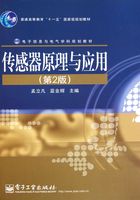
该多项式代数方程有图2.1所示的四种情况。

图2.1 传感器的静态特性
(1)理想线性特性如图2.1(a)所示。当式(2-1)中a0=a2=a3=…=an=…=0时,

因为直线上所有点的斜率相等,故传感器的灵敏度为

(2)输入/输出特性方程仅有奇次非线性项,如图2.1(c)所示,即

具有这种特性的传感器,在靠近原点的相当大范围内,输入/输出特性基本上呈线性关系。并且,当大小相等而符号相反时,y也大小相等而符号相反,相对坐标原点对称,即
f(x)=-f(-x)
(3)输入/输出特性非线性项仅有偶次项,如图2.1(b)所示,即

具有这种特性的传感器,其线性范围窄,且对称性差,即f(x)≠-f(x)。但用两个特性相同的传感器差动工作,即能有效地消除非线性误差。
(4)输入/输出特性有奇次项,也有偶次项,如图2.1(d)所示。
具有这种特性的传感器,其输入/输出特性的表示式即式(2-1)。
2. 非线性特性的“线性化”
在实际使用非线性特性传感器时,如果非线性项次不高,在输入量不大的条件下,可以用实际特性曲线的切线或割线等直线来近似地代表实际特性曲线的一段,如图2.2所示,这种方法称为传感器的非线性特性的线性化。所采用的直线称为拟合直线。

图2.2 输入-输出特性的非线性特性的线性化
传感器的实际特性曲线与拟合直线不吻合的程度,在线性传感器中称“非线性误差”或“线性度”。常用相对误差的概念表示“线性度”的大小,即传感器的实际特性曲线与拟合直线之间的最大偏差的绝对值对满量程输出之比为

式中
el——非线性误差(线性度);
Δmax——实际特性曲线与拟合直线之间的最大偏差值;
yFS——满量程输出。
传感器的输入/输出特性曲线的静态特性实验是在静态标准条件下进行的。静态标准条件是指没有加速度、振动、冲击(除非这些本身就是被测物理量),环境温度为20℃±5℃,相对湿度小于85%,气压为101kPa ±8kPa的情况。在这种标准状态下,利用一定等级的标准设备,对传感器进行往复循环测试,得到的输入/输出数据一般用表列出或绘成曲线,这种曲线称为实际特性曲线。
显然,非线性误差是以拟合直线作基准直线计算出来的,基准线不同,计算出来的线性度也不相同。因此,在提到线性度或非线性误差时,必须说明其依据怎样的基本直线。
(1)最佳平均直线与独立线性度
找出一条直线,使该直线与实际输出特性的最大正偏差等于最大负偏差。然而这样的直线不止一条,其中最大偏差为最小的直线,称为最佳平均直线。根据该直线确定的线性度称为独立线性度,如图2.3所示。

图2.3 独立线性度的理论曲线
在考虑独立线性度的情况下,式(2-6)应改为

(2)端点直线和端点线性度
取零点为直线的起始点,满量程输出的100%作为终止点,通过这两个端点做一条直线为基准直线(端点直线),根据该拟合直线确定的线性度称为端点线性度。用端点直线做拟合直线,优点是简单,便于应用;缺点是没有考虑所有校准数据的分布,故其拟合精度低。端点直线如图2.4所示。其方程为

图2.4 端点直线

端点直线的截距为

当检测下限x = xl=0时,端点直线方程为

(3)端点直线平移线
端点直线平移线如图2.5所示,它是与端点直线AB平行、并使在整个检测范围内最大正误差与最大负误差的绝对值相等的那根直线,即CD直线。若在各校准点中相对端点直线的最大正、负误差为+Δmax和-Δmax则端点直线平移线的截距为

图2.5 端点直线平移线

其斜率与式(2-9)相同。显然,端点直线平移线的方程为

当检测下限x=x1=0时

因此,以端点直线平移线作为理论特性时的最大误差为

端点直线平移线可看作是最佳平均直线的一种近似。
(4)最小二乘法直线和最小二乘法线性度
找出一条直线,使该直线各点与相应的实际输出的偏差的平方和最小,这条直线称为最小二乘法直线。若有n个检测点,其中第i 个检测点与该直线上相应值之间的偏差为

最小二乘法理论直线的拟合原则是使 最小,即使其对k和b的一阶偏导数等于零,故可得到b和k的表达式为
最小,即使其对k和b的一阶偏导数等于零,故可得到b和k的表达式为

从而得到

式中

n——校准点数。
将求得的k和b代入y=b+kx中,即可得到最小二乘法拟合直线方程。这种拟合方法的缺点是计算烦琐,但线性的拟合精度高。
2.1.2 灵敏度
线性传感器的校准曲线的斜率就是静态灵敏度,它是传感器的输出量变化和输入量变化之比,即

式中,kn为静态灵敏度。
例如位移传感器,当位移量Δx为1μm,输出量Δy为0.2mV时,灵敏度kn 为0.2mV/μm。非线性传感器的灵敏度通常用拟合直线的斜率表示。非线性特别明显的传感器,其灵敏度可用dy/dx表示,也可用某一小区域内拟合直线的斜率表示。
2.1.3 迟滞
迟滞表示传感器在输入值增长的过程中(正行程)和减少的过程中(反行程),同一输入量输入时,输出值的差别,如图2.6所示,它是传感器的一个性能指标。该指标反映了传感器的机械部件和结构材料等存在的问题,如轴承摩擦、灰尘积塞、间隙不适当、螺钉松动、元件磨损(或碎裂),以及材料的内部摩擦等。迟滞的大小通常由整个检测范围内的最大迟滞值Δmax与理论满量程输出之比的百分数表示,即

图2.6 迟滞特性

2.1.4 重复性
传感器的输入量按同一方向做多次变化时,我们发现,各次检测所得的输入/输出特性曲线往往不重复,如图2.7所示。产生不重复的原因和产生迟滞的原因相同。重复性误差eR 通常用输出最大不重复误差Δmax与满量程输出yFS之比的百分数表示,即

图2.7 重复性

式中
Δmax——Δ1max与Δ2max两数值之中的最大者;
Δ1max——正行程多次测量的各个测试点输出值之间的最大偏差;
Δ2max——反行程多次测量的各个测试点输出值之间的最大偏差。
不重复误差是属于随机误差性质的,校准数据的离散程度是与随机误差的精度相关的,应根据标准偏差来计算重复性指标。重复性误差eR又可按下式来表示

式中,σ为标准偏差。
服从正态分布误差,其σ可以根据贝塞尔公式来计算

式中
yi——测量值;
y——测量值的算术平均值;
n——测量次数。